
由我院郭正兴教授和朱明亮副教授团队承担的《FAST项目索驱动滑车维护系统方案设计》在前期通过专家评审并获得中国科学院国家天文台的高度评价后,2024年9月9日该项目索驱动滑车维护系统的设备采购与安装顺利通过中国科学院国家天文台组织的验收会,标志着系统的安装圆满完成。近日,经过为期一个月的试运行,该系统已达到预期效果,并正式投入使用。此项创新展示了智能建造技术在大型科学工程中的广泛应用前景,为中国射电天文学的发展提供了强有力的支持。
图1 项目验收(线上)
为解决FAST项目索驱动滑车的高空维护难题,东南大学土木工程学院的郭正兴教授和朱明亮副教授提出创意并与国家天文台合作细化实施了可控制式的全场景维护吊篮。自2023年初起,团队克服了无施工平台、跨度大、无经验可循等挑战,利用智能化控制系统,实现了吊篮在200余米高空的精确操作,突破了多项技术难题,并实现了不同索驱动之间的转换维护操作,显著提升了维护工作的安全性和效率,为FAST的日常维护提供了高效便捷的解决方案。

图2 智能化可控制式全场景维护吊篮
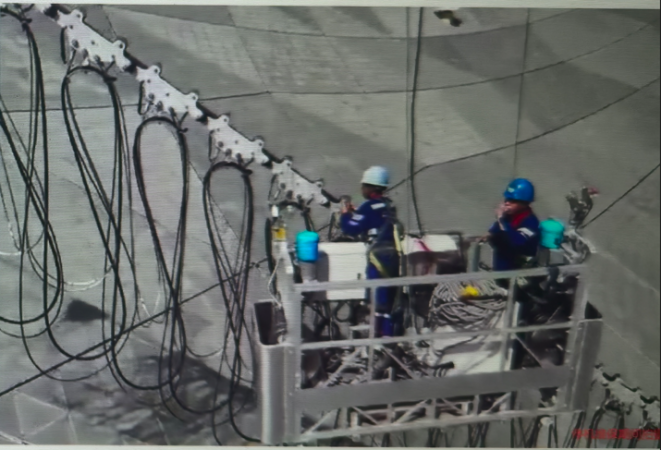
图3 吊篮系统实际运行图
FAST(500米口径球面射电望远镜)是世界上口径最大、灵敏度最高的射电望远镜,由中国科学院国家天文台主导,于2016年9月落成启用。国家天文台曾于2016年12月致信我校感谢郭正兴教授、罗斌教授在FAST项目中承担索网工程预研工作、参与高性能钢索研制、协助解决大跨度索网安装的技术难题的重要贡献。启用运营以来,东南大学郭正兴教授和朱明亮副教授团队与国家天文台团队展开紧密合作,为该项目的研发和运营提供持续的技术支持。为了实现望远镜的高精度定位,项目馈源舱采用六索驱动机构,并联牵引30吨重馈源舱在约140米高空和约200米范围内运动,实现馈源舱对天文轨迹的初步跟踪和舱内馈源接收机位姿的初步定位。然而,索驱动钢丝绳、滑车、缆线和牵引绳常年处于高空,人员可及性差,设备检查和维护比较困难,维护工作存在巨大挑战。东南大学郭正兴教授和朱明亮副教授团队运用智能建造技术助力高空维护创新突破,全面支持中国大型科学工程发展,得到业内外高度认可与一致好评。

图4 FAST项目总体方案

图5 索驱动滑车系统
